This blog is written for the following two courses of KTU using python.
CST284-Mathematics for Machine Learning-KTU Minor course and
CST294-Computational Fundamentals for Machine Learning-KTU honors course.
Queries can be send to Dr Binu V P. 9847390760
Search This Blog
1.10 Basis and Change of Basis
Basis
The basis is a coordinate system used to describe vector spaces (sets of vectors).
To be considered as a basis, a set of vectors must:
Be linearly independent. Span the space.
Every vector in the space is a unique combination of the basis vectors. The dimension of a space is defined to be the size of a basis set. For instance, there are two basis vectors in $\mathbb{R}^2$ (corresponding to the x and y-axis in the Cartesian plane), or three in $\mathbb{R}^3$.if the number of vectors in a set is larger than the dimensions of the space, they can’t be linearly independent. If a set contains fewer vectors than the number of dimensions, these vectors can’t span the whole space.
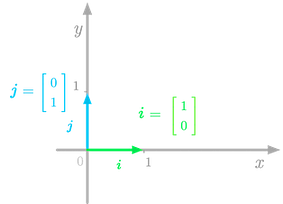
In the Cartesian plane, the basis vectors are orthogonal unit vectors (length of one), generally denoted as $i$ and $j$.
Figure 1: The basis vectors in the Cartesian plane.
For instance, in Figure 1, the basis vectors $i$ and $j$ point in the direction of the axis $x$ and $y$ respectively. These vectors give the standard basis. If you put these basis vectors into a matrix, you have the following identity matrix
Thus, the columns of $I_2$ span $\mathbb{R}^2$. In the same way, the columns of $I_3$ span $\mathbb{R}^3$ and so on.
Orthogonal basis
Basis vectors can be orthogonal because orthogonal vectors are independent. However, the converse is not necessarily true: non-orthogonal vectors can be linearly independent and thus form a basis (but not a standard basis).The orthogonal vectors are perpendicular to each other(90 degree apart) and their dot product is zero.
The basis of your vector space is very important because the values of the coordinates corresponding to the vectors depend on this basis. By the way, you can choose different basis vectors, like in the ones in Figure 2 for instance.
Figure 2. Another basis in a two-dimensional space. Keep in mind that vector coordinates depend on an implicit choice of basis vectors.
Coordinates and Linear combination
Any vector can be represented as linear combination of base vectors and are called the co-ordinates.
$\displaystyle \left[\begin{matrix}2 \\3\end{matrix}\right]= 2 \displaystyle \left[\begin{matrix}1 \\0\end{matrix}\right] +3 \displaystyle \left[\begin{matrix}0 \\1\end{matrix}\right] $ here the vector $[2,3]$ is represented as linear combination of base vectors $[1,0]$ and $[0,1]$ and the coordinate is $(2,3)$.
suppose if the base vectors are $[1,-1] $ and $[1,1]$ then the coordinates become different
Lets look at how transformation matrices of a linear mapping $\Phi: V \to W $ change if we change the bases in $V$ and $W$. Consider two ordered bases
$B=(b_1,\ldots,b_n) \quad \tilde{B}=(\tilde{b_1},\ldots,\tilde{b_n})$ of $V$
and two ordered bases of $W$
$C=(c_1,\ldots,c_m) \quad \tilde{C}=(\tilde{c_1},\ldots,\tilde{c_m})$ of $W$
Moreover $A_\phi \in \mathbb{R}^{m \times n}$ is the transformation matrix of the linear
mapping $\Phi : V \to W$ with respect to the bases $B$ and $C$, and $\tilde{A_\phi} \in \mathbb{R}^{m \times n}$ is the corresponding transformation mapping with respect to $\tilde{B}$ and $\tilde{C}$.
Then $\tilde{A_\phi}$ is given as $\tilde{A_\phi} = T^{-1}.A_\phi. S$
Here, $S \in \mathbb{R}^{n \times n}$ is the transformation matrix of $idV$ that maps coordinates with respect to $\tilde{B}$ onto coordinates with respect to $B$, and $T \in \mathbb{R}^{m \times m}$ is the transformation matrix of $idW$ that maps coordinates with respect to $\tilde{C}$ onto coordinates with respect to $C$.
Definition(Equivalence):
Two matrices $A,\tilde{A} \in \mathbb{R}^{m \times n}$ are equivalent, if there exist regular matrices
$S \in \mathbb{R}^{n \times n}$ AND $T \in \mathbb{R}^{m \times m}$ such that $\tilde{A}=T^{-1}AS$.
Definition(Similarity):
Two matrices $A,\tilde{A} \in \mathbb{R}^{n \times n}$ are similar, if there exist a regular matrix
$S \in \mathbb{R}^{n \times n}$ such that $\tilde{A}=S^{-1}AS$.
Remark:Similar matrices are always equivalent. However, equivalent matrices are not necessarily similar.
Conclusion
Understanding the concept of basis is a nice way to approach matrix decomposition (also called matrix factorization), like eigen decomposition or singular value decomposition (SVD). In these terms, you can think of matrix decomposition as finding a basis where the matrix associated with a transformation has specific properties: the factorization is a change of basis matrix, the new transformation matrix, and finally the inverse of the change of basis matrix to come back into the initial basis .
Introduction About Me Syllabus Course Outcomes and Model Question Paper University Question Papers and Evaluation Scheme -Mathematics for Machine learning CST 284 KTU Overview of Machine Learning What is Machine Learning (video) Learn the Seven Steps in Machine Learning (video) Linear Algebra in Machine Learning Module I- Linear Algebra 1.Geometry of Linear Equations (video-Gilbert Strang) 2.Elimination with Matrices (video-Gilbert Strang) 3.Solving System of equations using Gauss Elimination Method 4.Row Echelon form and Reduced Row Echelon Form -Python Code 5.Solving system of equations Python code 6. Practice problems Gauss Elimination ( contact) 7.Finding Inverse using Gauss Jordan Elimination (video) 8.Finding Inverse using Gauss Jordan Elimination-Python code Vectors in Machine Learning- Basics 9.Vector spaces and sub spaces 10.Linear Independence 11.Linear Independence, Basis and Dimension (video) 12.Generating set basis and span 13.Rank of a Matrix 14.Linear Mapping...
The Singular Value Decomposition ( SVD) of a matrix is a central matrix decomposition method in linear algebra.It can be applied to all matrices,not only to square matrices and it always exists.It has been referred to as the 'fundamental theorem of linear algebra'( strang 1993). SVD Theorem: Let $A^{m \times n}$ be a rectangular matrix of rank $r \in [0,min(m,n)]$. The SVD of A is a decomposition of the form. $A= U \Sigma V^T $ with an orthogonal matrix $U \in \mathbb{R}^{m \times m}$ with column vectors $u_i, i=1,\ldots,m$ and an orthogonal matrix $V \in \mathbb{R}^{n \times n}$ with column vectors $v_j, j=1,\ldots,n$.Moreover, $\Sigma$ is an $m \times n$ matrix with $\sum_{ii} = \sigma \ge 0$ and $\sigma_{ij}=0, i \ne j$. The diagonal entries $\Sigma_i=1,\ldots,r$ of $\sigma$ are called singular values . $u_i$ are called left singular vectors , and $v_j$ are called right singular vectors .By convention singular values are ordered ie; $\sigma_1 \ge \sigma_2 \ldots \sigma_r \...
Elementary Transformations Key to solving a system of linear equations are elementary transformations that keep the solution set the same, but that transform the equation system into a simpler form: Exchange of two equations (rows in the matrix representing the system of equations) Multiplication of an equation (row) with a constant Addition of two equations (rows) Add a scalar multiple of one row to the other. Row Echelon Form A matrix is in row-echelon form if All rows that contain only zeros are at the bottom of the matrix; correspondingly,all rows that contain at least one nonzero element are on top of rows that contain only zeros. Looking at nonzero rows only, the first nonzero number from the left pivot (also called the pivot or the leading coefficient) is always strictly to the right of the pivot of the row above it. The row-echelon form is where the leading (first non-zero) entry of each row has only zeroes below it. These leading entries are called...





Comments
Post a Comment